YUV 及视频帧
时间线
时间线,或者说播放器如何知道在正确的时间来播放每一帧。
当设计一个播放器时,在合适的时间播放每一帧很重要,否则音视频不同步会造成很严重的观看体验。
因此我们需要一些策略能平滑的播放每一帧。所以每一帧都有一个播放时间戳(PTS),PTS 是一个持续增长的数字,可以通过一个时间基数除以 帧率(fps) 来获得。
比如 fps=60/1,timebase=1/60000,timescale=1/timebase,每一个 PTS 的增长 timescale / fps = 1000,因此每一帧 PTS 的时间如下(假设开始为 0):
frame=0, PTS = 0, PTS_TIME = 0frame=1, PTS = 1000, PTS_TIME = PTS * timebase = 0.016frame=2, PTS = 2000, PTS_TIME = PTS * timebase = 0.033
几乎相同的场景,我们把 timebase 改成了 1/60。
frame=0, PTS = 0, PTS_TIME = 0frame=1, PTS = 1, PTS_TIME = PTS * timebase = 0.016frame=2, PTS = 2, PTS_TIME = PTS * timebase = 0.033frame=3, PTS = 3, PTS_TIME = PTS * timebase = 0.050
例如 fps=25,timebase=1/75,PTS 的增长将会是 timescale / fps = 3,如下:
frame=0, PTS = 0, PTS_TIME = 0frame=1, PTS = 3, PTS_TIME = PTS * timebase = 0.04frame=2, PTS = 6, PTS_TIME = PTS * timebase = 0.08frame=3, PTS = 9, PTS_TIME = PTS * timebase = 0.12- …
frame=24, PTS = 72, PTS_TIME = PTS * timebase = 0.96- …
frame=4064, PTS = 12192, PTS_TIME = PTS * timebase = 162.56
I、P、B 以及 DTS 、PTS 解析
在之前的学习已经了解视频传输需要进行编码和解码操作,来降低传输的大小。就视频图像编码和解码而言,必须保证编解码的方式要一致,约定一种压缩的方式很简单:编码器将多张图像进行编码后生产成一段一段的 GOP ( Group of Pictures ) , 解码器在播放时则是读取一段一段的 GOP 进行解码后读取画面再渲染显示。
GOP ( Group of Pictures) 是一组连续的画面,由一张 I 帧和数张 B / P 帧组成,是视频图像编码器和解码器存取的基本单位,它的排列顺序将会一直重复到影像结束。I 帧是内部编码帧(也称为关键帧),P 帧是前向预测帧(前向参考帧),B 帧是双向内插帧(双向参考帧)。简单地讲,I 帧是一个完整的画面,而 P 帧和 B 帧记录的是相对于 I 帧的变化。如果没有 I 帧,P 帧和 B 帧就无法解码。
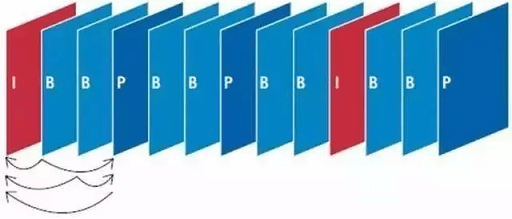
I 帧、P 帧、B 帧、GOP
I 帧(Intra-coded picture 帧内编码图像帧):I 帧表示关键帧,你可以理解为这一帧画面的完整保留;解码时只需要本帧数据就可以完成(因为包含完整画面)。又称为内部画面 (intra picture),I 帧通常是每个 GOP 的第一个帧,经过适度地压缩,做为随机访问的参考点,可以当成图象。
在 MPEG 编码的过程中,部分视频帧序列压缩成为 I 帧;部分压缩成 P 帧;还有部分压缩成 B 帧。I 帧法是帧内压缩法,也称为“关键帧”压缩法。I 帧法是基于离散余弦变换 DCT(Discrete Cosine Transform)的压缩技术,这种算法与 JPEG 压缩算法类似。采用 I 帧压缩可达到 1/6 的压缩比而无明显的压缩痕迹。
I 帧特点:
- 它是一个全帧压缩编码帧。它将全帧图像信息进行 JPEG 压缩编码及传输;
- 解码时仅用 I 帧的数据就可重构完整图像;
- I 帧描述了图像背景和运动主体的详情;
- I 帧不需要参考其他画面而生成;
- I 帧是 P 帧和 B 帧的参考帧(其质量直接影响到同组中以后各帧的质量);
- I 帧是帧组 GOP 的基础帧(第一帧),在一组中只有一个 I 帧;
- I 帧不需要考虑运动矢量;
- I 帧所占数据的信息量比较大。
I 帧编码流程:
- 进行帧内预测,决定所采用的帧内预测模式。
- 像素值减去预测值,得到残差。
- 对残差进行变换和量化。
- 变长编码和算术编码。
- 重构图像并滤波,得到的图像作为其它帧的参考帧。
P 帧(Predictive-coded Picture 前向预测编码图像帧):P 帧表示的是这一帧跟之前的一个关键帧(或 P 帧)的差别,解码时需要用之前缓存的画面叠加上本帧定义的差别,生成最终画面。(也就是差别帧,P 帧没有完整画面数据,只有与前一帧的画面差别的数据)
- P 帧的预测与重构:
- P 帧是以 I 帧为参考帧,在 I 帧中找出 P 帧“某点”的预测值和运动矢量,取预测差值和运动矢量一起传送。在接收端根据运动矢量从 I 帧中找出 P 帧“某点”的预测值并与差值相加以得到 P 帧“某点”样值,从而可得到完整的 P 帧。
- P 帧特点:
- P 帧是 I 帧后面相隔 1~2 帧的编码帧;
- P 帧采用运动补偿的方法传送它与前面的 I 或 P 帧的差值及运动矢量(预测误差);
- 解码时必须将 I 帧中的预测值与预测误差求和后才能重构完整的 P 帧图像;
- P 帧属于前向预测的帧间编码。它只参考前面最靠近它的 I 帧或 P 帧;
- P 帧可以是其后面 P 帧的参考帧,也可以是其前后的 B 帧的参考帧;
- 由于 P 帧是参考帧,它可能造成解码错误的扩散;
- 由于是差值传送,P 帧的压缩比较高。
- P 帧的预测与重构:
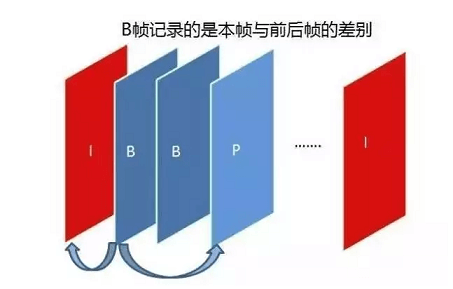
B 帧(Bidirectionally predicted picture 双向预测编码图像帧):B 帧是双向差别帧,也就是 B 帧记录的是本真与前后帧的差别。换言之,要解码 B 帧,不仅要取得之前的缓存画面,还要解码之后的画面,通过前后画面的与本帧数据的叠加取得最终的画面。B 帧压缩率高,但是解码时 CPU 会比较累。
B 帧的预测与重构:
- B 帧以前面的 I 或 P 帧和后面的 P 帧为参考帧,找到 B 帧某点的预测值和两个运动矢量,并取预测差值和运动矢量传送。接收端根据运动矢量在两个参考帧中“找出(算出)”预测值并与差值求和,得到 B 帧“某点”样值,从而可得到完整的 B 帧。采用运动预测的方式进行帧间双向预测编码。
B 帧特点:
- B 帧是由前面的 I 或 P 帧和后面的 P 帧来进行预测的;
- B 帧传送的是它与前面的 I 帧或 P 帧和后面的 P 帧之间的预测误差及运动矢量;
- B 帧是双向预测编码帧;
- B 帧压缩比最高,因为它只反映并参考帧间运动主体的变化情况,预测比较准确;
- B 帧不是参考帧,不会造成解码错误的扩散。
为什么需要 B 帧:
从上面的看,我们知道 I 和 P 的解码算法比较简单,资源占用也比较少,I 只要自己完成就行了,P 呢,也只需要解码器把前一个画面缓存一下,遇到 P 时就使用之前缓存的画面就好了,如果视频流只有 I 和 P,解码器可以不管后面的数据,边读边解码,线性前进,大家很舒服。那么为什么还要引入 B 帧?
网络上的电影很多都采用了 B 帧,因为 B 帧记录的是前后帧的差别,比 P 帧能节约更多的空间。但这样一来,文件小了,解码器就麻烦了,因为在解码时,不仅要用之前缓存的画面,还要知道下一个 I 或者 P 的画面(也就是说要预读预解码),而且, B 帧不能简单地丢掉,因为 B 帧其实也包含了画面信息,如果简单丢掉,并用之前的画面简单重复,就会造成画面卡(其实就是丢帧了),并且由于网络上的电影为了节约空间,往往使用相当多的 B 帧,B 帧用的多,对不支持 B 帧的播放器就造成更大的困扰,画面也就越卡。
GOP 序列和 IDR:
在 H264 中图像以序列为单位进行组织,一个序列是一段图像编码后的数据流。一个序列的第一个图像叫做 IDR 图像(立即刷新图像),IDR 图像都是 I 帧图像。H.264 引入 IDR 图像是为了解码的重同步,当解码器解码到 IDR 图像时,立即将参考帧队列清空,将已解码的数据全部输出或抛弃,重新查找参数集,开始一个新的序列。这样,如果前一个序列出现重大错误,在这里可以获得重新同步的机会。IDR 图像之后的图像永远不会使用 IDR 之前的图像的数据来解码。
一个序列就是一段内容差异不太大的图像编码后生成的一串数据流。当运动变化比较少时,一个序列可以很长,因为运动变化少就代表图像画面的内容变动很小,所以就可以编一个 I 帧,然后一直 P 帧、B 帧了。当运动变化多时,可能一个序列就比较短了,比如就包含一个 I 帧和 3、4 个 P 帧。
在视频编码序列中,GOP 即 Group of picture(图像组),指两个 I 帧之间的距离,Reference(参考周期)指两个 P 帧之间的距离。两个 I 帧之间形成一组图片,就是 GOP(Group Of Picture)。
PTS 和 DTS
P 帧需要参考前边的 I 或 P 帧才可以生成一张完整的图片,而 B 帧则需要参考前面 I 帧或 P 帧及其后面的一个 P 帧才可以生成一张完整的图片,而 B 帧则需要参考前面 I 帧或 P 帧及其后面的一个 P 帧才可以生成一张完整的图片。这样就带来了一个问题:在视频流中,先到来的 B 帧无法立即解码,需要等待它依赖的后面的 I、P 帧先解码完成,这样一来播放时间与解码时间不一致了,顺序打乱了,那这些帧该如何播放呢?这时就引入了另外两个概念:DTS 和 PTS。
- DTS(Decoding Time Stamp):即解码时间戳,这个时间戳的意义在于告诉播放器该在什么时候解码这一帧的数据。
- PTS(Presentation Time Stamp):即显示时间戳,这个时间戳用来告诉播放器该在什么时候显示这一帧的数据。
虽然 DTS、PTS 是用于指导播放端的行为,但它们是在编码的时候由编码器生成的。
在视频采集的时候是录制一帧就编码一帧发送一帧的,在编码的时候会生成 PTS,这里需要特别注意的是 frame(帧)的编码方式,在通常的场景中,编解码器编码一个 I 帧,然后向后跳过几个帧,用编码 I 帧作为基准帧对一个未来 P 帧进行编码,然后跳回到 I 帧之后的下一个帧。
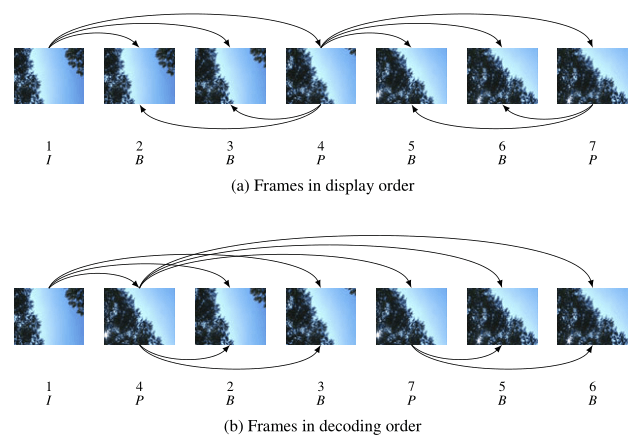
编码的 I 帧和 P 帧之间的帧被编码为 B 帧。之后,编码器会再次跳过几个帧,使用第一个 P 帧作为基准帧编码另外一个 P 帧,然后再次跳回,用 B 帧填充显示序列中的空隙。这个过程不断继续,每 12 到 15 个 P 帧和 B 帧内插入一个新的 I 帧。P 帧由前一个 I 帧或 P 帧图像来预测,而 B 帧由前后的两个 P 帧或一个 I 帧和一个 P 帧来预测,因而编解码和帧的显示顺序有所不同,如下所示:
假设编码器采集到的帧是这个样子的:
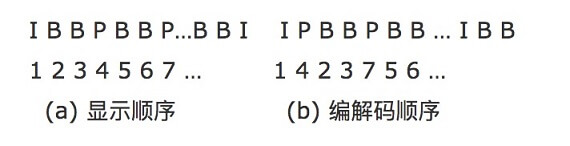
I B B P B B P
那么它的显示顺序,也就是 PTS 应该是这样:
1 2 3 4 5 6 7
编码器的编码顺序是:
1 4 2 3 7 5 6
推流顺序也是按照编码顺序去推的,即:
I P B B P B B
那么接收断收到的视频流也就是:
I P B B P B B
这时候去解码,也是按照收到的视频流一帧一帧去解的了,接收一帧解码一帧,因为在编码的时候已经按照 I、B、P 的依赖关系编好了,接收到数据直接解码就好了。那么解码顺序是:
I P B B P B B
DTS:1 2 3 4 5 6 7
PTS:1 4 2 3 7 5 6
可以看到解码出来对应的 PTS 不是顺序的,为了正确显示视频流,这时候我们就必须按照 PTS 重新调整解码后的 frame(帧),即:
I B B P B B P
DTS:1 3 4 2 6 7 5
PTS:1 2 3 4 5 6 7
另外,并不是一定要使用 B 帧。在实时互动直播系统中,很少使用 B 帧。主要的原因是压缩和解码 B 帧时,由于要双向参考,所以它需要缓冲更多的数据,且使用的 CPU 也会更高。由于实时性的要求,所以一般不使用它。不过对于播放器来说,遇到带有 B 帧的 H264 数据是常有的事儿。在没有 B 帧的情况下,存放帧的顺序和显示帧的顺序就是一样的,PTS 和 DTS 的值也是一样的。
YUV
YUV(也称 YCbCr):Y 标识明亮度,UV 的作用时描述影像色彩及饱和度。
- 主要采样格式有 YUV 4:2:0、YUV 4:2:2、YUV 4:4:4
- 学习文档
RGB 与 YUV 的关系:
- RGB 用于屏幕图像的展示。
- YUV 用于采集与编码。
YUV 格式 4:2:0 标准格式:4:2:0 并不意味着没有 Cr 分量,它实际指得对每行扫描线来说,只有一种色度分量,以 2:1 得抽样率存储。相邻得扫描行存储不同的色度分量,例如一行是 4:2:0 下一行就是 4:0:2 再下一行就是 4:2:0。
YUV 的存储格式
YUV 是一个比较笼统地说法,针对它的具体排列方式,可以分为很多种具体的格式:
- 打包 (packed) 模式:将每个像素点的 Y、U、V 分量交叉排列并以像素点为单元连续的存放在同一数组中,通常几个相邻的像素组成一个宏像素 (macro-pixel)。
- 平面 (planar) 格式:使用三个数组分开连续的存放 Y、U、V 三个分量,即 Y、U、V 分别存放在各自的数组中。

